 订阅纳米技术焦点播送
订阅纳米技术焦点播送研究者从自雕电子学(w/View)中设想像生命型人工生物
 最近的进展允许电子材料重构自身,引导研究者设想人工生物由自组装自修电子模块组成
最近的进展允许电子材料重构自身,引导研究者设想人工生物由自组装自修电子模块组成
最近的进展允许电子材料重构自身,引导研究者设想人工生物由自组装自修电子模块组成
 研究者开发完全可回收自愈软机器人,由新动聚合物组成,快速无线重编程并重构新功能素材克服了先前挑战 回收可持续软机器人
研究者开发完全可回收自愈软机器人,由新动聚合物组成,快速无线重编程并重构新功能素材克服了先前挑战 回收可持续软机器人
 结合流水和固态的好处 研究人员展示出各种功能 包括小于小于体积的窄道导航对象捕捉操作通过二次或内分解模式电路修复控制切换 使用自身传导特性 甚至可重构为自愈合线感应器广可应用工作环境 这些新奇磁粘机 使他们有希望未来应用 生物医学和可穿戴设备
结合流水和固态的好处 研究人员展示出各种功能 包括小于小于体积的窄道导航对象捕捉操作通过二次或内分解模式电路修复控制切换 使用自身传导特性 甚至可重构为自愈合线感应器广可应用工作环境 这些新奇磁粘机 使他们有希望未来应用 生物医学和可穿戴设备
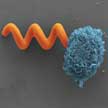 免疫系统激活大型词组, 一种正在寻找病原体的免疫细胞, 成为开发功能性微机器人的主要障碍,研究者正努力克服这一挑战,用特殊涂层来抗衡纳米粒子,以避免通过大型字法检测研究者报告新工作开发隐式微机器人,这些微机器人可以在免疫系统雷达下飞翔,并延长运行窗口时间,因为它们无法消除。
免疫系统激活大型词组, 一种正在寻找病原体的免疫细胞, 成为开发功能性微机器人的主要障碍,研究者正努力克服这一挑战,用特殊涂层来抗衡纳米粒子,以避免通过大型字法检测研究者报告新工作开发隐式微机器人,这些微机器人可以在免疫系统雷达下飞翔,并延长运行窗口时间,因为它们无法消除。
 研究者开发出混合精子微机,可载荷并高效控制游向流出血液sperm基微机拥有数大优势,特别是精子旗击打所生成的强推力sperm还能够游数天 拖力达100pn精微机流操作的最重要特征是,精微机流与流并近边界相游能力,由于剪裁压力,血速低于平均速度
研究者开发出混合精子微机,可载荷并高效控制游向流出血液sperm基微机拥有数大优势,特别是精子旗击打所生成的强推力sperm还能够游数天 拖力达100pn精微机流操作的最重要特征是,精微机流与流并近边界相游能力,由于剪裁压力,血速低于平均速度
 生物学为人工智能和形状变换机器人提供重要的原理证明和设计挑战多生物成功利用形状变换机制适应生存机器人设计师最先问的是 不清楚机器人何时和如何改变形状最新进度审查概述机器人相关文献,改变形状增强并扩展功能
生物学为人工智能和形状变换机器人提供重要的原理证明和设计挑战多生物成功利用形状变换机制适应生存机器人设计师最先问的是 不清楚机器人何时和如何改变形状最新进度审查概述机器人相关文献,改变形状增强并扩展功能
 研究人员应用微机和纳米机所开发概念,展示嵌入金属机框架的载荷受控运动和交付以螺旋MOF为基的微机由人工细菌旗子驱动,可在弱旋转磁场控制下三维游并跟踪复杂轨迹游泳者对肿瘤响应并可以有选择地自动定向提供药平台
研究人员应用微机和纳米机所开发概念,展示嵌入金属机框架的载荷受控运动和交付以螺旋MOF为基的微机由人工细菌旗子驱动,可在弱旋转磁场控制下三维游并跟踪复杂轨迹游泳者对肿瘤响应并可以有选择地自动定向提供药平台
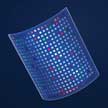 电子设备版本人眼光接收器可广泛应用,从机器人人形视觉到人工视网膜植入以恢复视觉或甚至扩展视觉波长范围研究者现已证明高性能无滤波人造光接收器可以通过将新颖光学金属/二电机微集成结构与真空存取千兆维应答设备整合实现易制造人工光传感器仿真光谱响应
电子设备版本人眼光接收器可广泛应用,从机器人人形视觉到人工视网膜植入以恢复视觉或甚至扩展视觉波长范围研究者现已证明高性能无滤波人造光接收器可以通过将新颖光学金属/二电机微集成结构与真空存取千兆维应答设备整合实现易制造人工光传感器仿真光谱响应